









| Рубрикатор |  |
 |
| Статьи |  |
ИКС № 11 2006 | |
|
| 01 ноября 2006 |
Точность – вежливость навигации
Вид навигационного сервиса определяется точностью системы, которая зависит от используемых эталонов частоты. Достижение высокой ТОМ возможно лишь при высокой точности взаимной синхронизации бортовых шкал времени. Эта задача возложена на бортовой атомный эталон частоты – сердце системы глобального позиционирования. Именно его надежность и стабильность в значительной мере определяют согласованность работы элементов системы навигации.Погрешность часов на GPS-спутниках не превышает ± 1 с за 160 тыс. лет, а погрешность «привязки» шкалы системного времени в ГЛОНАСС к шкале UTC – не хуже 1 мкс. Системное время Galileo (GST) может быть смещено относительно международного атомного времени не более чем на 50 нс. Предполагаемая точность определения местоположения у Galileo также существенно выше, чем у конкурентов (табл. 3).
Определяем координаты. Глобальное позиционирование в GPS, ГЛОНАСС и Galileo основано на методе триангуляции. В идеале для получения координат потребителя достаточно расчета псевдодальностей до трех спутников, одновременно находящихся в зоне его радиовидимости. Однако метод применим лишь при условии, что шкала бортового времени всех спутников абсолютно синхронизирована с часами потребителей. В этом-то и заключается главная сложность позиционирования. Ведь часы наземного приемного устройства значительно менее точные, чем в навигационных КА, а даже ничтожная ошибка отзывается большой погрешностью. Чтобы исключить эту разницу, необходимо математически увеличить количество граничных условий, т.е. вычислить расстояние не до трех, а до четырех спутников. Это позволит точно определить координаты и скорость движения объекта, «привязать» часы потребителя к высокоточной шкале.

Ситуация упрощается, если известна высота. В этом случае для установления широты и долготы достаточно принять сигналы от трех спутников. Трех КА вполне достаточно и в тех редких случаях, когда определяют местоположение приемника, снабженного точными часами.
Повышая точность, работаем на будущее. Для того чтобы исключить погрешности в системе GPS, разработаны широкозоновые и региональные дифференциальные подсистемы. К числу первых относятся системы контрольно-корректирующих станций на американском континенте – WAAS (Wide Area Augmentation System) и LAAS (Local Area Augmentation System), в Европе – EGNOS (European Geostationary Navigation Overlay System), в Японии – MSAS (MTSAT Space-based Augmentation System, где MTSAT – Multifunctional Transport Satellite System), передающие через спутники корректирующую информацию на приемники пользователей. Региональные дифференциальные подсистемы и станции начинают развиваться в России, однако главная преграда на их пути – законодательные требования, обессмысливающие точность координат GPS.
Европейская геостационарная система навигационного дополнения EGNOS реализована на базе спутников Inmarsat. Это, по сути, первый этап проекта европейской глобальной навигационной спутниковой системы GNSS, который планируется завершить в 2015 г. На втором этапе будет развернута система GNSS-2 на базе Galileo.
Навигационный комплекс EGNOS значительно проще, чем у спутников GPS и ГЛОНАСС. Риск потери его целостности (неспособности системы своевременно оповещать о сбоях в работе) не превысит 2 х 10-7 в любом интервале времени длиной в 150 с, а максимальная задержка сигнала оповещения об отказе – 6 с. Риск потери непрерывности обслуживания самой системы не более 10-5 в час.
GPS. Среди факторов, ограничивающих точность определения положения, есть и политические. Пример тому – режим селективного доступа, примерно в 5 раз занижающий точность за счет умышленного искажения навигационных измерений. Таковым подвергаются данные об орбите спутника и показания его часов путем внесения добавочного псевдослучайного сигнала. Величина среднеквадратического отклонения из-за влияния этого фактора – примерно 30 м, точность определения координат – 20–100 м. И хотя с мая 2000 г. точность повышена до 15 м, однако нет гарантии, что ограничения не будут введены вновь
При полной ОГ точность определения координат для потребителей системы ГЛОНАСС составит (с вероятностью 99,7%): в горизонтальной плоскости – 50–70 м, в вертикальной – 70 м; скорость движения – 15 см/с; время – 0,7 мкс. Дифференциальный режим работы существенно увеличивает точность.
Для существующей ОГ точность колеблется от 100 м до 2 км, что не в полной мере отвечает потребностям навигации. Кроме того, из-за недостаточного количества спутников доступность навигации (доля суток, когда в данной точке доступны как минимум 4 КА) значительно меньше единицы.
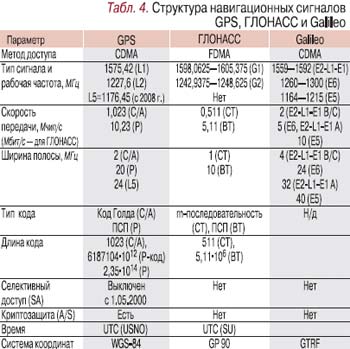
Частоты навигации
 GPS, ГЛОНАСС и Galileo работают в близко расположенных, но неперекрывающихся участках частотного спектра (табл. 4). Чтобы различать сигналы разных систем их принято обозначать соответственно L, G и E (см. рисунок).
GPS, ГЛОНАСС и Galileo работают в близко расположенных, но неперекрывающихся участках частотного спектра (табл. 4). Чтобы различать сигналы разных систем их принято обозначать соответственно L, G и E (см. рисунок). Все КА GPS передают два навигационных сигнала на частотах L1=1575,42 МГц и L2=1227,6 МГц, формирующихся от единого эталона частоты (L2/L1=60/77). Используется метод кодового доступа (CDMA): передатчики разных КА излучают сигналы на одной частоте, разделяя сигналы по их индивидуальному коду. В перспективе предусмотрен режим передачи третьего кода на частоте L5 (1176,45 МГц), а также информации для военных пользователей на участках L3 (1381,05 МГц) и L4 (1379,913 МГц). Управляющая и служебная информация поступает на GPS-спутники с наземных станций по каналам S-диапазона (2227,5 МГц), обратный канал (КА–Земля) работает на частоте 1783,74 МГц.
В ГЛОНАСС реализован метод разделения частот (FDMA): каждый спутник работает на независимой частоте (для ОГ из 24 КА требуется 24 частоты). В действительности же для КА, находящихся в противоположных точках орбитальной плоскости, допустимо излучение сигналов на одинаковых частотах, поэтому можно обойтись 12 рабочими частотами в каждом из двух диапазонов. Такие сигналы могут быть разделены в приемнике за счет пространственной и доплеровской селекции.
В Galileo, где применяется метод CDMA, каждый спутник излучает 10 навигационных сигналов с правой круговой поляризацией в диапазонах частот: 1164–1215 МГц (E5), 1260–1300 МГц (E6) и 1559–1592 (E2/L1/E1). Для передачи сигналов навигационного дополнения выделен участок в C-диапазоне (для ГСО КА). Кроме того, бортовой ретранслятор SAR будет принимать аварийные сигналы на частотах 406,0–406,1 МГц и ретранслировать их в полосе 1544–1545 МГц, обозначаемой как L6. Частотный план Galileo позволяет обеспечивать электромагнитную совместимость с существующими системами GPS и ГЛОНАСС.
Сигналы навигации
В GPS используются два основных сигнала: грубый С/А-код (Coarse/Acquisition) и точный P-код (Precision code). Первый дает относительно невысокую точность и предназначен для гражданских пользователей, второй позволяет вычислять координаты почти на порядок точнее, однако доступ к нему ограничен.
В ГЛОНАСС применяются сигналы стандартной (диапазон 1,6 ГГц) и высокой (1,2/1,6 ГГц) точности. Первый (аналогичен C/A-коду в GPS) доступен всем потребителям на глобальной основе при наличии у них соответствующей аппаратуры.
В Galileo предусмотрена передача 10 навигационных сигналов на трех несущих – E5, E6 и E2/L1/E1. Сигнал в E5 передается на двух поднесущих (E5a и E5b) с использованием BPSK-модуляции. Проблема совместимости сигналов в эфире решена за счет разных методов модуляции. Сигнал в диапазоне E2/L1/E1 содержит три канала (A, B и C), передаваемых на одной несущей, причем канал А доступен пользователям службы PRS.
Заметили неточность или опечатку в тексте? Выделите её мышкой и нажмите: Ctrl + Enter. Спасибо!