









| Рубрикатор |  |
 |
| Статьи |  |
ИКС № 1 2021 | |
|
| Николай НОСОВ | 14 мая 2021 |
Беспилотные автомобили в полосе препятствий
По данным исследования Arthur D Little, уровень доверия к беспилотным автомобилям в мире снизился с 64% в 2015 г. до 53% в 2020 г. Еще ниже показатель в России, где только 36% респондентов сообщили о готовности пользоваться беспилотными машинами.
Трудный выбор
Опасения во многом вызваны СМИ, которые уделяют повышенное внимание редким случаям ДТП с участием беспилотников. При этом как-то забывается, что робот не садится за руль в нетрезвом виде, не превышает скорость и соблюдает правила дорожного движения. Представители отечественного Минтранса не раз заявляли, что использование беспилотных автомобилей позволит снизить число ДТП на 90%.
Другое опасение – информационная безопасность. Страхи по поводу персональных данных во многом преувеличены: ничего нового о местоположении людей, постоянно пользующихся мобильными телефонами, злоумышленники не узнают. А вот государству вряд ли понравится бесконтрольная передача данных за рубеж и внешний мониторинг дорог с помощью установленных на автомобилях видеокамер.
Не стоит забывать о возможности взлома системы с последующим перехватом управления и созданием аварии, что так любят показывать в фантастических фильмах. Это тоже проблема, требующая пристального внимания специалистов по информационной безопасности. Также возможны ошибки в программном обеспечении автомобилей – не очевидно, что тестирование будет проходить на уровне стандартов NASA.
Если ДТП все же произойдет, непонятно, кто будет отвечать за последствия перед законом. Сейчас в основном используется презумпция виновности водителя. Например, в Германии во всех случаях аварии с участием автоматизированного автомобиля будет считаться виновным водитель, пока данные «черного ящика» автомобиля или другие результаты расследования происшествия не докажут обратного. Но что будет, когда вырастет поколение пользователей беспилотных автомобилей, не умеющих самостоятельно принимать решения на дороге в критической ситуации? Или не имеющих технической возможности повлиять на ситуацию, например, при отсутствии в кабине руля?
В России в рамках проводимого эксперимента с использованием беспилотных автомобилей ответственность за ДТП и иные происшествия, произошедшие с участием высокоавтоматизированного транспортного средства, возлагается на его собственника при отсутствии виновных действий других участников дорожного движения.
Сложный вопрос: какие схемы поведения на дороге беспилотных транспортных средств закладывать в них разработчикам, чтобы после аварии не попасть под суд. Правила дорожного движения в разных странах разные, не говоря уже о различиях в стиле езды (например, в Закавказье и в Канаде).
Над этим задумываются производители. Израильский разработчик систем ADAS компания Mobileye, купленная в 2017 г. Intel, предложила пять правил безопасного вождения автономных автомобилей, алгоритмы действий и конкретные формулы расчета параметров движения автомобиля.
Правила безопасного движения беспилотных автомобилей 1. Держи дистанцию. Основываясь на общих законах физики и опыте вождения, в автошколах учат оставлять достаточно места между собой и автомобилем впереди, чтобы иметь время на принятие решения в случае его внезапного торможения. Дистанцию определяют по «правилу двух секунд». Нужно заметить место, которое проехал идущий впереди автомобиль, и сосчитать до двух. Если за это время вы проскочили ориентир, дистанцию нужно увеличить. 2. Контролируй боковое расстояние. Люди дрейфуют во время езды по своей полосе, идут на обгон и перестраиваются. Водитель-человек слегка инстинктивно притормаживает, чтобы сохранить безопасное расстояние от такого автомобиля. Так же должен поступать и беспилотный автомобиль. 3. Уступи дураку дорогу. Линии разметки, дорожные знаки и светофоры определяют приоритет проезда перекрестков. Однако бывают случаи, когда другие нарушают правила, и водитель понимает, что лучше уступить, чтобы избежать аварии. Для беспилотных автомобилей это правило должно быть формализовано. 4. Будь осторожен в местах с ограниченной видимостью. На видимость влияют многие факторы. Помимо погоды затруднить обзор дороги могут крутые повороты, здания и другие автомобили. В такой ситуации люди повышают бдительность, чтобы избежать непредвиденной опасности. Например, в районе школы, так как дети действуют непредсказуемо. Так же должен поступать и беспилотный автомобиль. 5. Нарушай правила, если это поможет избежать аварии, не вызвав новой. Правила 1–4 помогают определить, что такое опасная ситуация и какова должна быть реакция на нее беспилотного автомобиля. Однако иногда опасная ситуация возникает настолько внезапно, что столкновения нельзя избежать без нарушения правил дорожного движения. Например, если объект внезапно появляется прямо на пути беспилотного автомобиля, тот должен предотвратить столкновение, свернув на следующую полосу движения. Но поступать так можно только при условии, что это не вызовет другого столкновения. Высший приоритет беспилотного автомобиля – предотвращение аварии, если его действия не приведут к новой. Источник: по материалам Mobileye |
По мнению главного исполнительного директора Mobileye и старшего вице-президента Intel Амнона Шашуа, принятие четких правил Mobileye в качестве стандарта позволило бы избежать разного подхода к моральным проблемам, так часто обсуждаемым в прессе.
Проблемой является и климатическая специфика стран. Легко говорить о беспилотном автомобиле в солнечной Калифорнии, а вот как он поедет по сугробам после мощных снегопадов, обрушившихся на Москву в феврале?
Искусственный интеллект – наше все?
Информационные системы автономного автомобиля должны обеспечивать надежность работы систем и безопасность движения, причем в условиях ограниченного объема (edge-ЦОД автомобиля не должен превышать размер багажника) и конкурентной цены. Однако средняя наработка на отказ полностью автоматизированной машины (соответствующей уровню 5 по классификации SAE) должна быть на порядки выше, чем в предусматривающей вмешательство водителя (уровень 4). Это означает, что, как и в надежном ЦОДе, потребуется резервирование систем и каналов связи, а это, в свою очередь, увеличит стоимость транспортного средства.
Сбор информации в автомобиле осуществляется с помощью видеокамер, радаров и лидаров – специальных сенсоров, сканирующих окружающее пространство и создающих трехмерное изображение внешней среды. В решениях Mobileye надежность достигается за счет отдельных подсистем видеокамер и лидар-радара, каждая из которых способна в одиночку осуществлять непрерывное автономное вождение.
Другой источник информации для автомобиля – уже созданные цифровые карты дорог. Простейший вариант – загруженные в навигаторы карты, которые повсеместно используются уже сейчас. Но для безопасного автономного вождения требуется больше – детальная цифровая картина маршрута, например, такая, как собираемая машинами «Яндекса» в Москве или Tesla в Калифорнии.
Для сбора данных одни компании используют специализированные автомобили, а Mobileye собирает данные с автомобилей массовых моделей. Обычные машины, оснащенные системами Mobileye, передают компактные пакеты данных о статичной окружающей среде объемом 10 Кбайт на километр. Передается информация о средней скорости движения потока, дорожных знаках и разметке, светофорах, т.е. в терминологии компании – «данные сегментации дорог».
К 2025 г. объемы данных, поступающих от 100 млн умных автомобилей по всему миру, будут составлять, по прогнозам Dell Technologies, 10 эксабайт в месяц. Для оптимального использования этих данных в крупных дата-центрах и edge-ЦОДах автомобилей потребуются новые подходы к системам хранения данных, которые должны будут обрабатывать и каталогизировать информацию в режиме реального времени. Для того чтобы обеспечить работу с такими объемами информации, потребуются СУБД с элементами искусственного интеллекта.
С ростом числа подключенных автомобилей увеличится нагрузка на сети передачи данных. Для взаимодействия «умной» машины с другими автомобилями или с элементами «умной» дороги важна низкая задержка, которую, скажем, сети Wi-Fi, работающие в нелицензируемом диапазоне частот, гарантировать не смогут. Решением могут стать сети 5G.
И конечно, потребуется усовершенствовать системы распознавания образов. Искусственный интеллект автомобилей уже достиг впечатляющих результатов, но все же может быть введен в заблуждение нестандартными ситуациями. Наклейки на знаках остановки или даже размещение знаков под разными углами и ракурсами могут привести к тому, что нейронные сети распознавания знаков неверно классифицируют знаки. Классический пример: знак «Стоп» при незначительных, с точки зрения человека, изменениях начинает восприниматься как знак ограничения скорости в 45 миль.
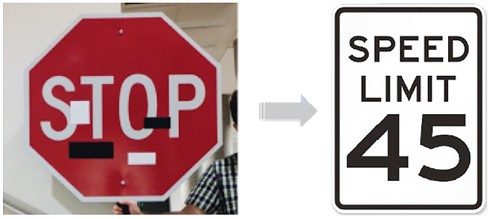
Источник: Cornell University
Ухабов на пути высокоавтоматизированных автомобилей еще много. Но раньше или позже полоса препятствий будет преодолена, и беспилотники выедут на ровную
дорогу.
Заметили неточность или опечатку в тексте? Выделите её мышкой и нажмите: Ctrl + Enter. Спасибо!